Technical Specifications
As specified in the requirement specification, the project aims to develop a practical system that utilizes Meshtastic, Arduino-based nodes, and drones to create a deployable mobile network in disaster-prone or network-deprived areas. The main components include LoRaWAN Arduino modules, the use of the Meshtastic project to create our mobile network, an application developed with Flutter that serves as the controller of the said mobile network, and drones to deploy the modules so that the network region can be created. Modules will be reprogrammed with the necessary code, C++, to correspond to the app. The Meshtastic communication project will be a main function in our Lora-Net application to help create the off-grid mobile network using an API. Drones will be equipped with an Arduino module, both being equipped with different sensors to identify their surroundings, and a designated feature to carry each module to its intended location.
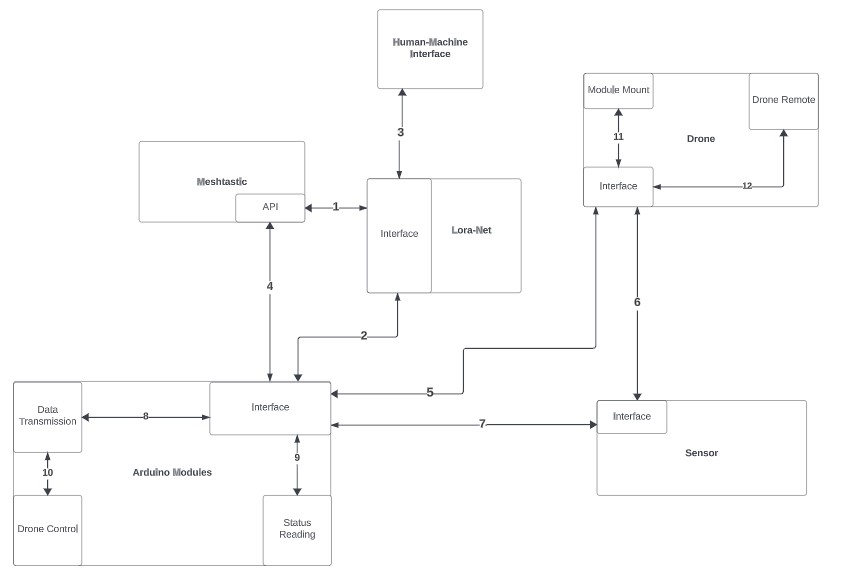
Arduino Modules
The Arduino Modules subsystem manages the functionality of all the Arduino modules used to create the LoRa mesh network. In terms of hardware, the drones and sensors used in the project will be integrated through the Arduino modules. This subsystem will also be responsible for managing all the data being passed through the network.
Meshtastic
The Meshtastic subsystem involves using Meshtastic’s routing protocol to help create a network for the region that will be marked by the Arduino modules. Meshtastic devices within range will form a mesh network that allows messages to pass back and forth between the connected devices. It primarily includes the Mesh routing algorithm, which uses Bluetooth to connect to both the Lora 32 modules and the Lora-Net application.
Drone*
The drone subsystem will consist of two main components, the module mount and the drone remote. This subsystem will play an important role in transporting the Arduino modules after the user receives the optimal network setup location from the LoRa-Net application. The Arduino modules will be attached to the drones via the module mount, and the instruction/direction for the drone will be received from the drone remote that the user controls.
Sensors
The Sensor subsystem is responsible for collecting critical data from both the Arduino modules and drones. It comprises several individual subsystems, each dedicated to specific functions, including GPS location data, battery level monitoring, and accelerometer data. These subsystems work collaboratively to optimize the placement of the Arduino modules and drones within the desired network coverage area.
Human Machine Interface
The Human Machine Interface should be able to allow the user to interact and manipulate the LoRa Net. The subsystems under this section would help the user set preferences with the network, GPS, and application, sending information and requests to the Arduino Modules to help carry out some of these commands. We also hope to add drone functionality for the user, but this is a lesser goal.